Patent Pending — AI-Powered Aerial Search Detection Platform
SAR Vision
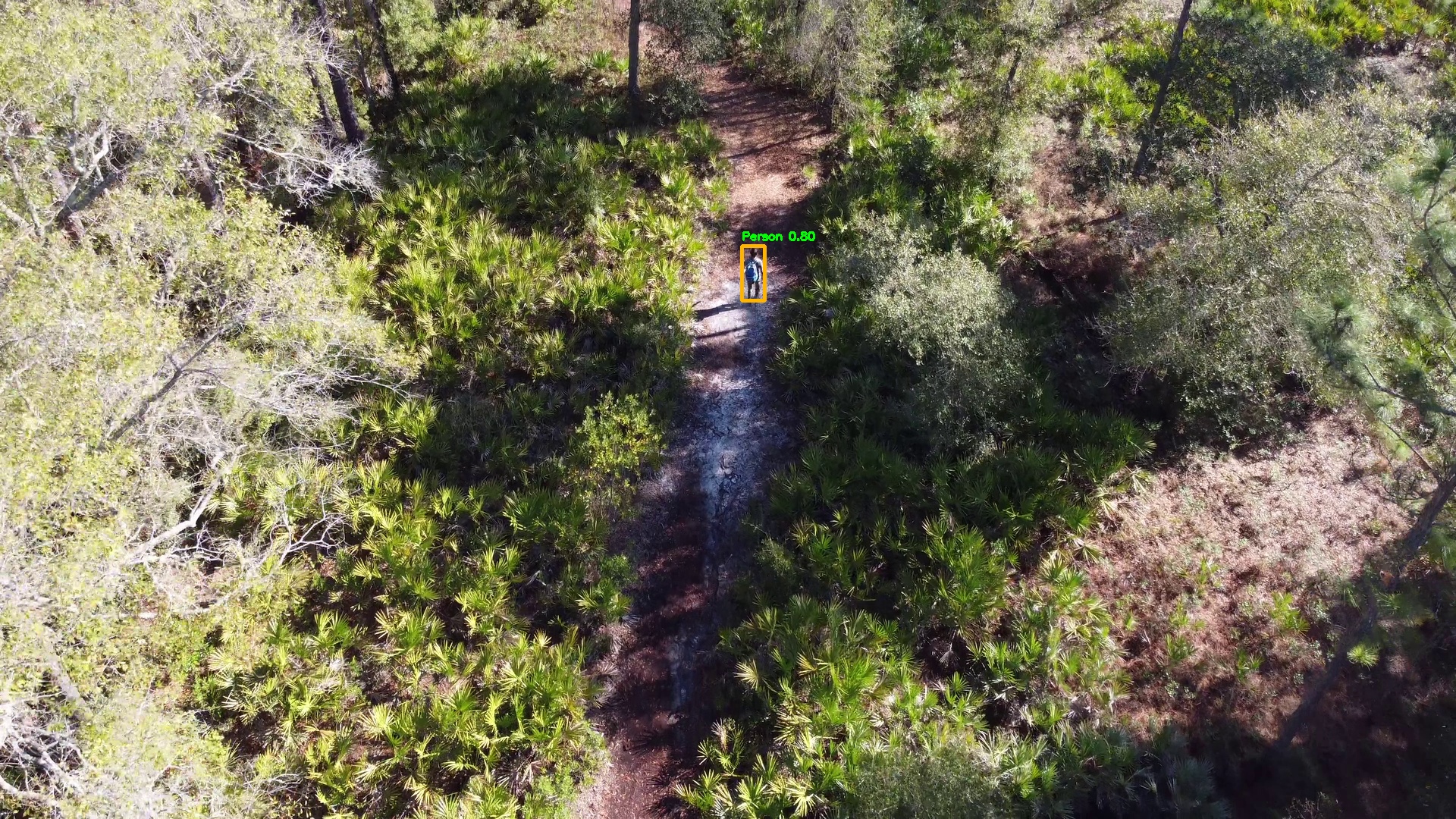
Aerial Human Detection
for Search & Rescue Teams
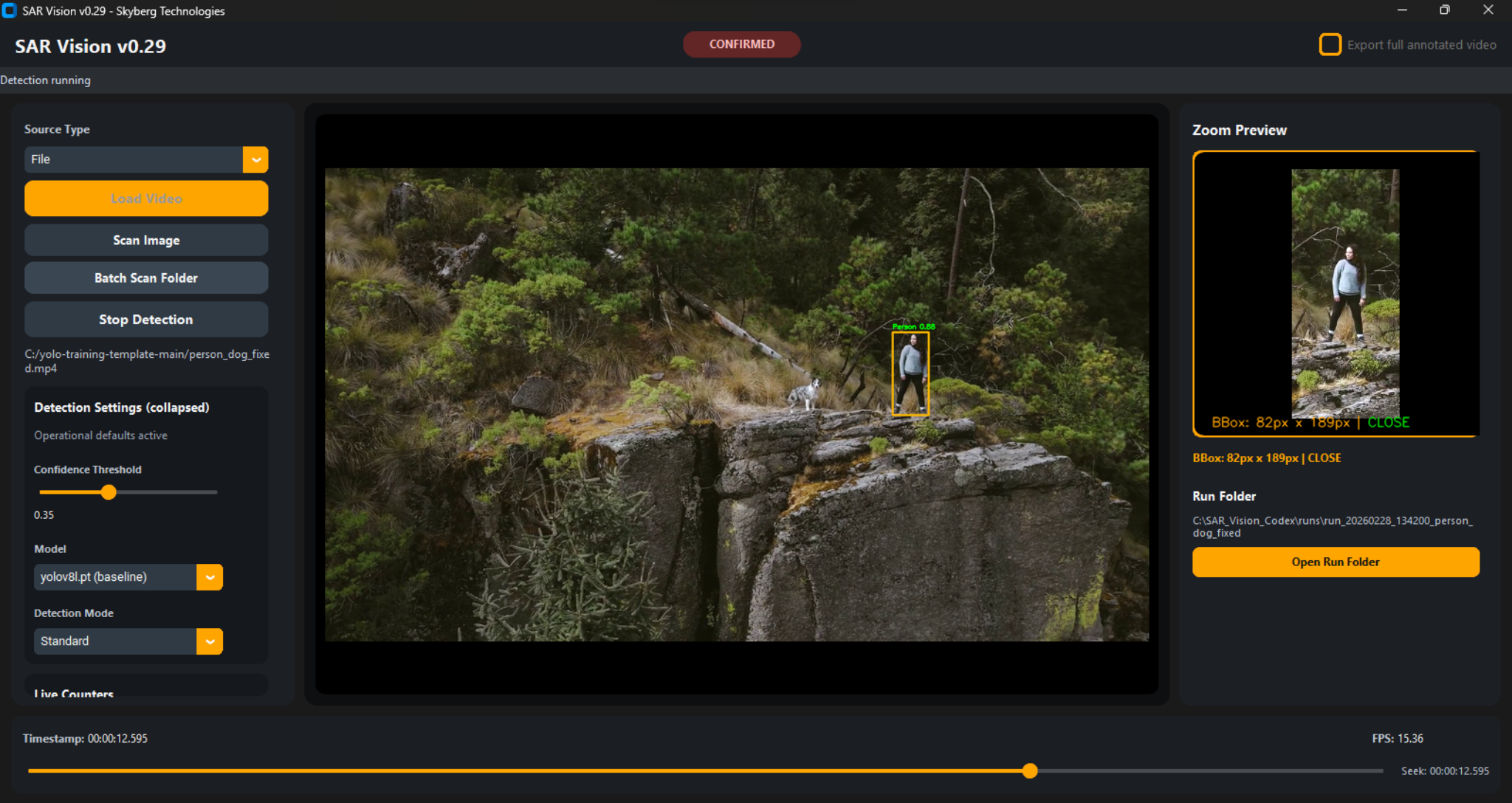
SAR Vision processes drone video in real time and flags potential human contacts for operator review. Designed for field conditions where connectivity is unreliable, hardware is constrained, and operational continuity is critical. Built to support the judgment of trained SAR personnel — not to replace it.
Developed by Brian Skyberg, active SAR team member with field deployment experience.
Current Stability Release: v0.42 — Stability-focused release with fault-tolerant signal handling, persistent data logging, and tested stability during extended field sessions.
Real-time 1080p detection on standard field laptop hardware — no proprietary equipment required
Fully offline operation — no network uplink required in the field or during active search
Recall-optimized detection — configured to surface all plausible human contacts for human review
Drone-agnostic input — HDMI capture with automatic signal recovery, RTMP stream, or recorded video file from any platform